Featured Projects

Click above image for demo video: I created a VR camera platform (or a robotic head) using a RaspberryPi 4, PCA9685 board, level shiftier, servos, stereo camera, and an Android phone. I wrote the code runing on the PI in Python and the code on the phone in Java. The orange parts are all modeled in 3D and 3D printed with ball bearings pressed into critical areas.

I founded startup company and designed the first product whcih was tested with the public. Plastic parts designed for injection molding, prototypes used pressurized resin casting.

Design of an End-Effector for Robotic Tumbleweed Processing
Re-designed a robotic End-effector to improve manufacturability, reduce cost, and move some components to in house manufacturing. Designed a new master-slave hydraulic control system including a new hydraulic manifold. Final product attaches to a robotic vacuum and collects tumbleweeds.
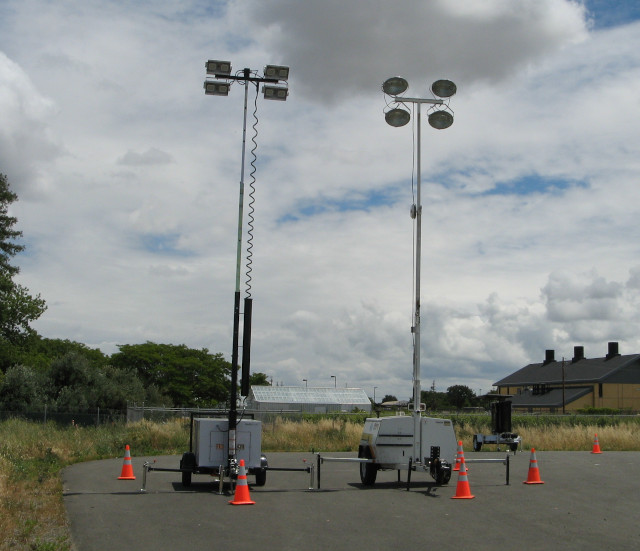
Integration of Hydrogen-Based Clean Energy for Construction Site Lighting
Preformed a detailed comparison between a diesel-powered metal halide lighting trailer and a novel hydrogen fuel cell powered plasma lamp trailer. Testing drove development of new LED luminaire as alternative to plasma lamps. Collected field measurements and generated isoilluminance grids, calculated uniformity, and calculated veiling luminance ratio.
Paper available: click for reference
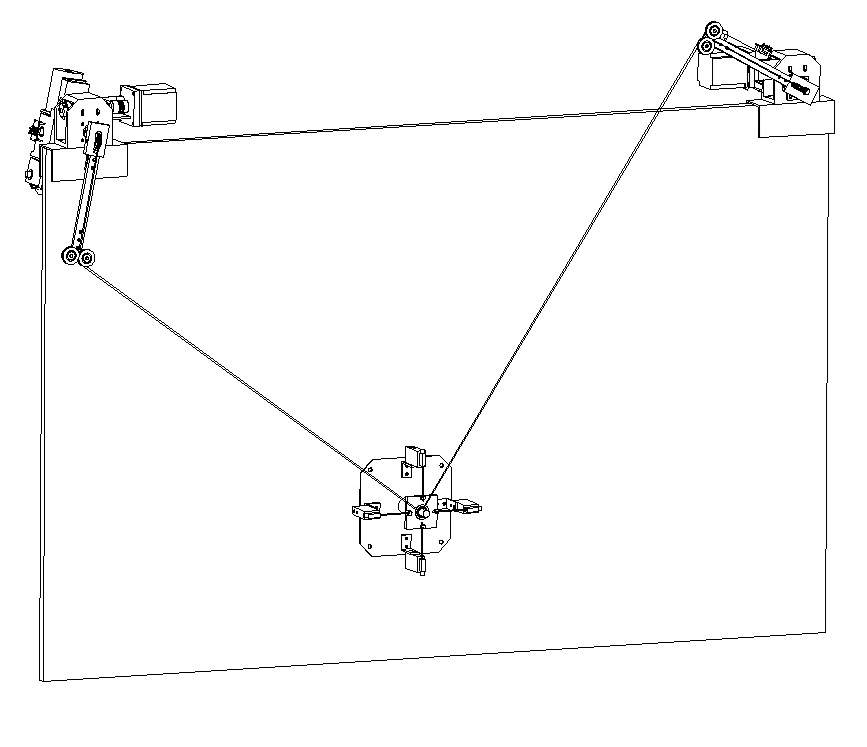
Underconstrained Cable Robot: Theory & Proof-of-Concept
Developed a robotic system with a large workspace capability for the application of removing graffiti from large signs or walls. Designed an innovative mechatronics system consisting of a servo winch system with movable pulley arms together with distributed control using an Android phone as the main computer.
Paper available: click for reference
Camping Accessories: Startup Business
Founded startup company and designed the first product which was presented to the public. The product solved tissue paper accessibility issues by allowing for quick access and refill using practically any type of toilet paper. Integrated flashlight and emergency whistle. Components were 3D printed and used to make molds for pressurized resin casting.
A preliminary patent in the USA was granted click for patent reference.
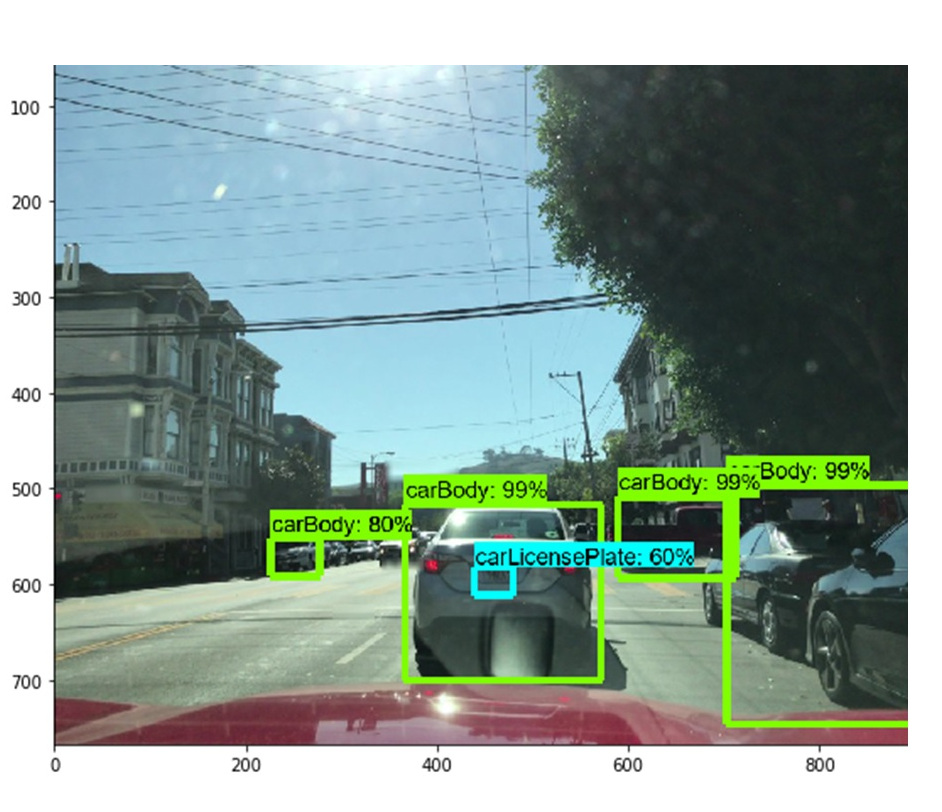
Machine Vision System for Vehicle Count and Traffic Management
Developed a TensorFlow AI machine vision system concept for traffic management. System can detect vehicles and license plates. License plates can be matched as they pass by key points to ensure that every vehicle that entered an area successfully left the area. Using Tensoflow Lite, this could be run on simple android phones.

Crack Detection: AI Based Machine Vision as Input to Robotic System
Developed TensorFlow based object detection using state of the art Deep Learning models to detect longitudinal cracks in the road. Vision system was used as one component of a larger mechatronic system worked on by a team of engineers to develop visual servoing control that could physically trace cracks.
VR Visualization: Pre-Testing
Programmed a VR environment using solid models and GODOT open source software to run on an Android phone. The VR environment was designed to visualize large outdoor work plans without having to setup the real test.
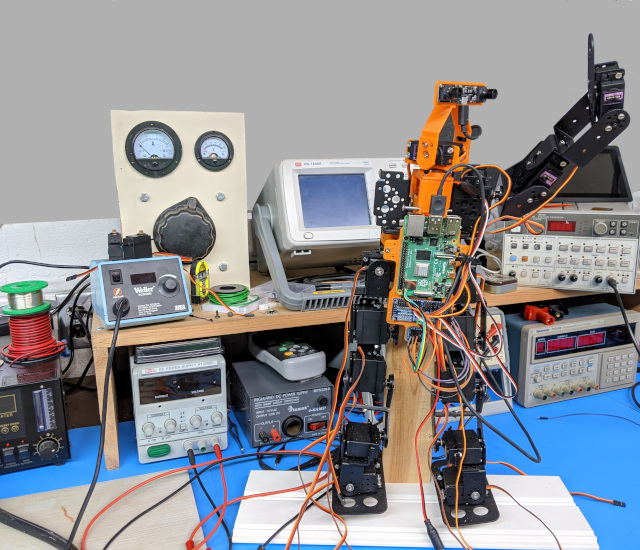
Robotics: Mechatronics
Developing a low cost mechatronics based Humanoid Robotic System using a RaspberryPI, an Android phone, stero cameras, absolute orientation sensors, and many servos. The system requires coordinated motion of 16 or more servo systems. The head provides stereo vision to VR glasses. The robot can be remote controlled over WiFi.
Applications: Education tool in mechatronics and/or robotics instrumentation, hobby applications, etc.
Demonstration Teaching Videos: here
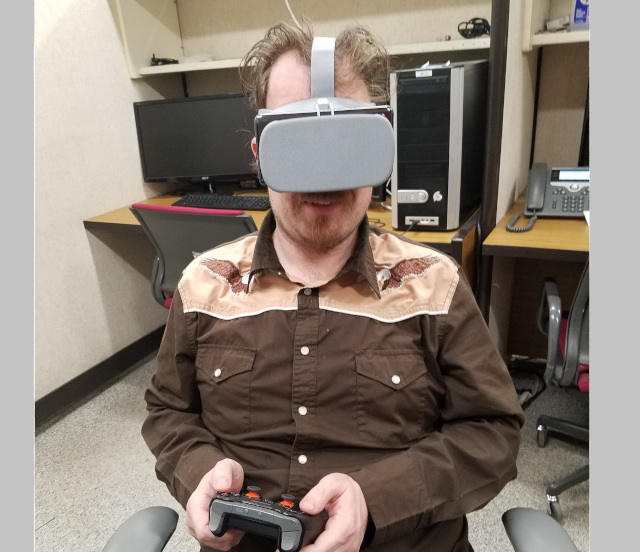
Robotics: VR Camera Platform
Developed a VR camera platform using a RaspberryPi 4, a PCA9685 board, a level shiftier, and an Android phone. The PI is running my custom python code and the Android phone is running an app I wrote in Java. I designed the orange components in 3D and 3D printed them with an FDM printer.
Demo Operation Video: here